Il dispositivo viene stampato in 3D tutto in una volta e può prelevare e rilasciare oggetti e non ha bisogno di elettronica per funzionare, quindi non è necessario alcun assemblaggio o altra elaborazione post-stampa.
Il dispositivo è stato sviluppato da un team di robotici dell'Università della California di San Diego, in collaborazione con i ricercatori della società BASF ed é progettato per essere montato all'estremità di un braccio robotico tradizionale.
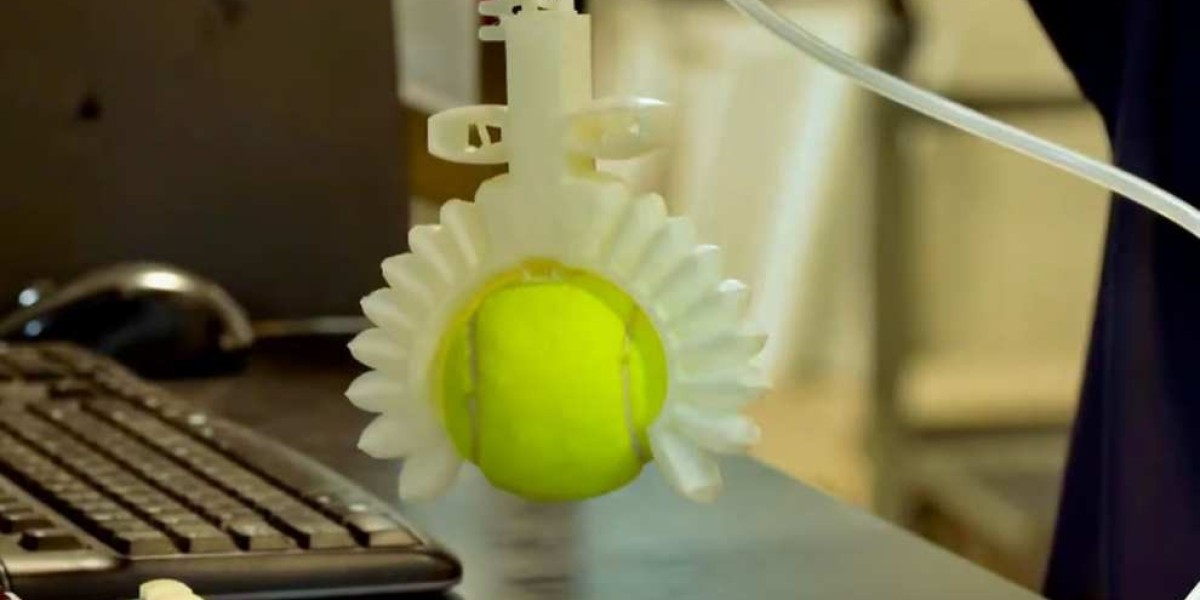
I ricercatori volevano progettare una pinza morbida che fosse pronta per l'uso non appena esce dalla stampante 3D, dotata di sensori di gravità e tattili integrati. Di conseguenza, la pinza può raccogliere, trattenere e rilasciare oggetti. E secondo loro, nessuna pinza di questo tipo esisteva prima di questo lavoro.
Per ridurre al minimo le possibilità di perdite che consentirebbero all'aria di fuoriuscire, ogni strato della pinza è stampato in una linea continua di polimero fuso. Poiché quel materiale è allo stato fuso quando viene depositato, ogni strato si lega a quello sottostante mentre si raffredda. Sebbene la pinza non richieda elettricità per funzionare, deve essere collegata a una fonte di aria compressa. Quell'aria scorre attraverso un tubo di gomma e nella pinza.
Quando il centro della "mano" del dispositivo viene premuto contro un oggetto, la pressione provoca l'apertura di una valvola interna. Ciò consente all'aria di fluire nelle due dita a soffietto, facendole espandere e chiudere intorno all'oggetto: rimangono chiuse finché la pinza è in orientamento verticale. Una volta girato lateralmente (orizzontale), tuttavia, il peso dell'oggetto provoca l'apertura di un'altra valvola. L'aria quindi rifluisce dalle dita, facendole aprire e rilasciare l'oggetto.
Si spera che un giorno la pinza possa essere utilizzata nella manipolazione di oggetti delicati come frutta e verdura. Inoltre, la pinza può anche essere montata su un robot per attività di ricerca ed esplorazione, oppure può funzionare senza vincoli, con una bombola di gas ad alta pressione come unica fonte di energia.
I ricercatori hanno pubblicato i dettagli del loro lavoro sulla rivista Science Robotics.