Un gruppo di ricerca presso il Robotics Institute della Carnegie Mellon University ha sviluppato una suite di sistemi robotici e pianificatori che consentono ai robot di esplorare ambienti insidiosi e sconosciuti più rapidamente e di creare mappe più accurate e dettagliate.
I sistemi dell'Autonomous Exploration Research Team consentono ai robot di esplorare in modo completamente autonomo, trovando la strada e creando una mappa senza l'intervento umano. Il team di ricerca della CMU ha combinato un sensore lidar a scansione 3D, una fotocamera lungimirante e sensori di unità di misurazione inerziale con un algoritmo di esplorazione per consentire al robot di determinare dove si trova adesso, dove è stato e dove dovrebbe andare dopo.
Questi sensori possono essere collegati a quasi tutte le piattaforme robotiche. In questo momento, il gruppo della CMU sta utilizzando una sedia a rotelle motorizzata e droni per gran parte dei suoi test.
Il sistema consente ai robot di esplorare in tre diverse modalità. Nella prima modalità, una persona può controllare il movimento e la direzione del robot mentre i sistemi autonomi gli impediscono di schiantarsi contro muri, soffitti o altri oggetti. Nella modalità due, una persona può selezionare un punto su una mappa e il robot si dirigerà verso quel punto. Nella modalità finale, il robot parte da solo ed esplora l'intero spazio per creare una mappa.
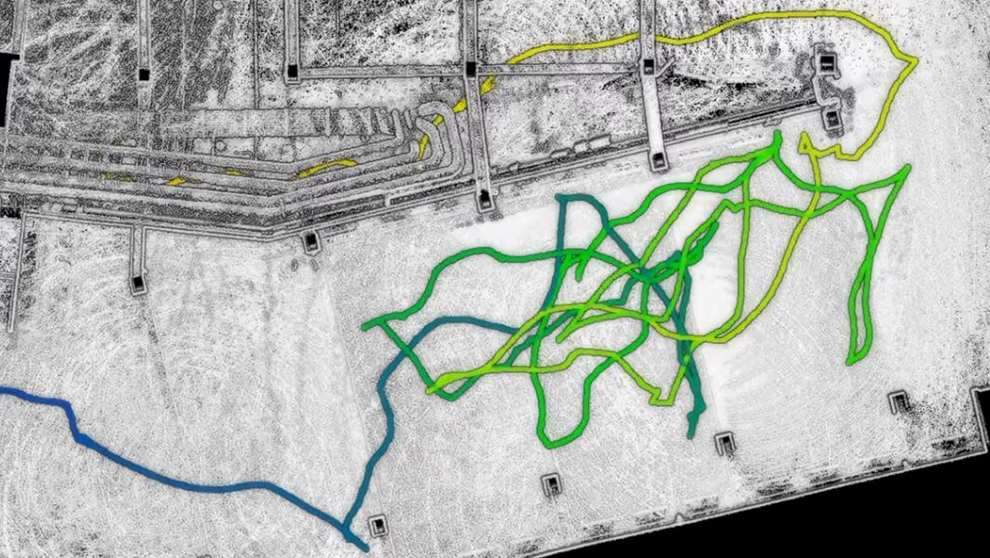
I ricercatori della CMU lavorano su sistemi di esplorazione come questo da oltre tre anni. Finora, il sistema ha esplorato e mappato diverse miniere sotterranee, un garage, il Cohon University Center e diversi altri luoghi interni ed esterni nel campus della CMU.
Il sistema è più efficiente rispetto ai precedenti approcci alla navigazione e alla mappatura robotica. Può creare mappe più complete riducendo della metà il tempo di esecuzione. È sufficientemente flessibile da funzionare in condizioni di scarsa illuminazione e pericolose in cui la comunicazione è discontinua, come grotte, tunnel e strutture abbandonate.